RTG视觉纠偏系统
CRH7004系列
 |
|
基于视觉系统产品扩展系列
|
|
基于视觉的防撞系统
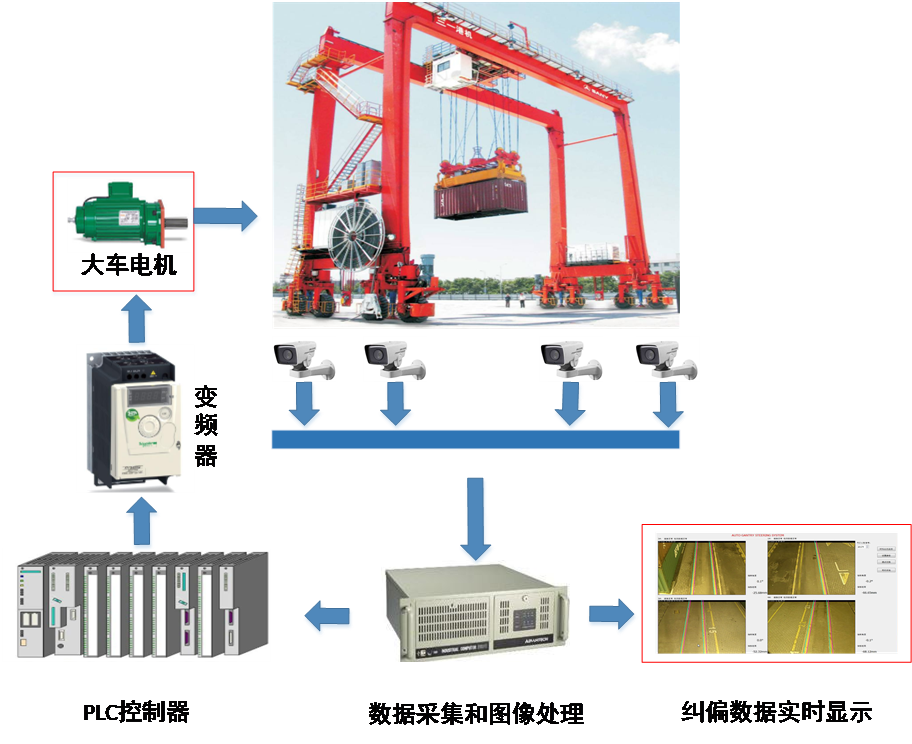
产品介绍 RTG自动纠偏系统由高精度相机、图像采集与处理器、PLC 控制器、变频器和大车电机等组成。RTG自动纠偏系统通过大车运行方向4个相机实时采集车道线图像数据同时将图像数据传输到工控机,工控机通过对图像数据处理算法识别检测出RTG方向偏差和位置偏差, 通过PLC完成偏差信息的接收和行车控制处理,通过变频器控制大车左右电机的速度差达到自动纠偏功能。
产品特性 1)可实现RTG行走过程中障碍物智能识别与距离测量。 2)规避RTG在行走过程中碰撞危险。 3)可独立或联合RTG大车行走自动纠偏系统实现。
|
|
|
|
|
|
基于视觉的防集卡起吊系统
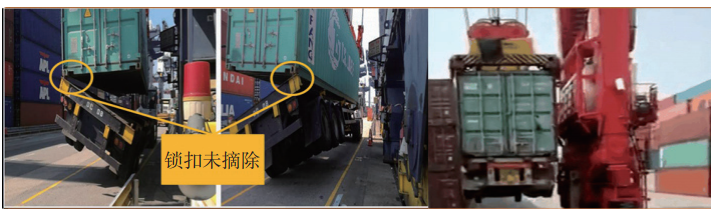
产品介绍 当集卡到达港口堆场进行卸车作业时需将集装箱锁头解开,如果没有解锁或或者解锁未完成,在集装箱起吊时车身会被一并吊起,造成车辆损坏和危及集卡司机安全。 |
|
|
|
|
|
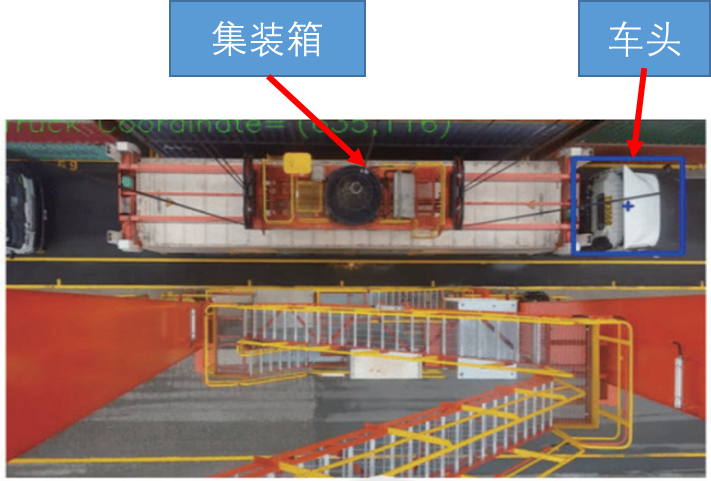
基于视觉的防砸车头和集卡引导系统
产品介绍 根据顶视相机感知车头位置与集裝箱即将落放位置的相对位移量,一旦预测到可能发生意外,立即向龙门吊PLC电控系统发出指令;同时根据基于顶视摄像头视觉对集卡本体进行识别以及停靠位置识别后进行集卡引导。 产品特性 对集卡本体进行识别以及停靠位置识别后可进行集卡引导。 |
|
|
|
|
|
基于视觉的抓放辅助定位系统
产品介绍 基于机器视觉的抓放辅助定位系统识别与跟踪方式对集装箱锁孔、集卡车架锁销进行精确定位, 实现集装箱对位抓放辅助功能。
产品特性 基于顶视摄像头视觉对集卡本体进行识别以及停靠位置识别后进行集卡引导。 |
|
|
|
|
|
基于视觉锁扣识别系统
产品介绍 该系统基于机器视觉技术,识别和检测集装箱底锁是否摘除,并进行相应预警控制。
产品特性 1)识别与跟踪方式对集装箱锁孔、集卡车架锁销进行精确定位。 2)实现集装箱对位抓放辅助功能。 |
|
|
 |
|
|